事例1 ロボットアーム
ロボットアーム
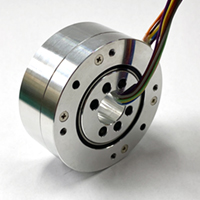
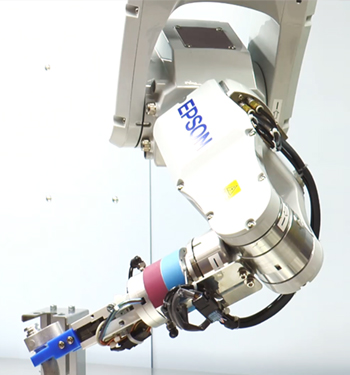
弊社のスリップリングがロボットアームの関節部に使用された例です。
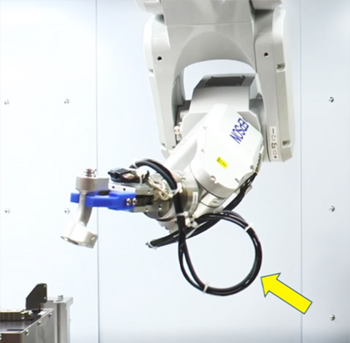
ロボットアームの先端には、加工部品の把持のために、エア駆動のハンドが一般的に使用されます。ハンドの駆動に使用するエアーを供給するためにエアーチューブを使用すると、その引き回しによる配管が複雑になりますが、今回、弊社にご依頼いただいたメーカー様では、その懸案事項を解決するロータリージョイントを製造・販売されております。しかし、ハンドの駆動の確認を行うためのセンサの引き回しも必要になり、弊社に上記ロータリージョイントと同等サイズのスリップリングの引合いを頂きました。
要求サイズが小さく、ロータリージョイントとの接続要求に対応するところに苦労しました。
紹介事例は4chですが、厚さ違いで8chのスリップリングも準備しています。
| 使用製品 | TSR10215 貫通型4ch スリップリング |
|---|---|
| 使用箇所 | ロボットアーム(ロータリージョイントと接続) |
| サイズ | 外径55mm、内径14mm、厚さ16.7mm |
課題と解決事例
課題
ロータリージョイントとスリップリングがない場合
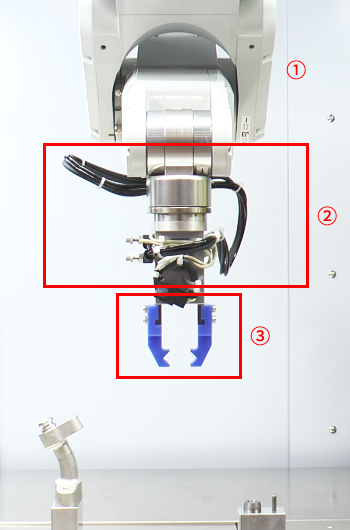
①ロボットアーム ②エアーチューブおよび電線 ③エアーハンド
チューブや電線が回転の度にねじれたり、周辺機器と干渉したりする恐れがあり危険。

解決
ロータリージョイントとスリップリングを使用した場合
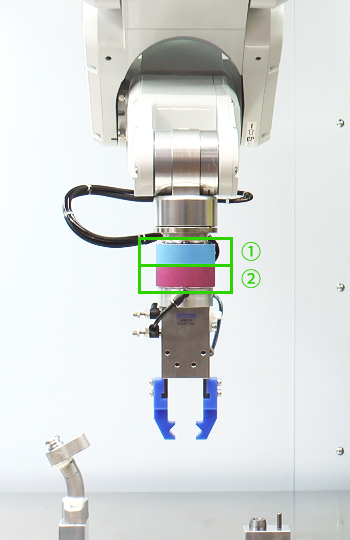
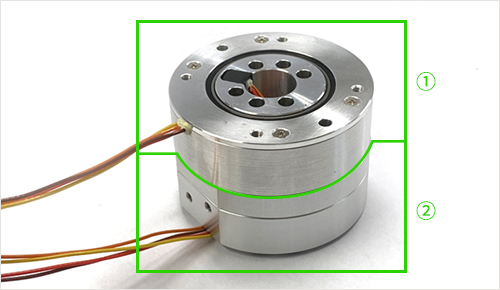
①スリップリング ②ロータリージョイント
チューブや電線がねじれず、コンパクトに収まっています。